고정 헤더 영역
상세 컨텐츠
본문
군사용 무인 로봇 트렌드(2) - 유인-무인 협력(MUM-T)

유인-무인 시스템 협업을 통한 시너지 극대화
군사용 무인 로봇 트렌드(2) - 유인-무인 협력(MUM-T)
최현호 군사커뮤니티 밀리돔 운영자/자유기고가

[그림 1] 유인-무인 협력의 대표적 사례인 미 육군의 AH-64E 공격헬기과 MQ-1C 무인기
군에 무인 시스템이 도입된 이후 정보·감시·정찰(ISR)과 정밀 공격 등에서 많은 발전을 이루었다.
그러나 미 국방부는 유인-무인 시스템의 조화를 통한 협력으로 발전시켜 나가고 있다. 단순한 무인 시스템의 운용과 정보 습득을 넘어 네트워크 중심전에 활용하기 위한 장비를 개발하고 전술과 전략을 연구하고 있다.
무인 시스템 군집과 함께 무인 시스템이 열어나갈 미래전의 모습이 될 유인-무인 협력을 소개한다.
• 유인-무인 협력(MUM-T)
무인 시스템이 군사적 목적으로 도입된 지 100년이 되었다. 제1차 세계대전이 한창이던 1918년 미국이 개발한 시험적인 무인 폭탄 비행기인 캐터링 버그Kettering Bug가 첫 비행을 했다.
그 후 제2차 세계대전 당시 미국의 B-17 무인 폭격기와 독일의 골리아스Goliath 무인 폭탄 차량, 중동전 당시 이스라엘의 무인기 그리고, 베트남전과 걸프전 당시 미 공군과 해군의 무인기 등 여러 전쟁에서 다양한 무인 시스템이 사용되었다.
이때까지 조종자Operator와 플랫폼 또는 시스템의 관계였던 인간과 무인 시스템의 관계가 기술의 발전으로 한층 발전하게 되었다.
미 국방부에서는 인간 또는 유인 플랫폼과 무인 플랫폼 사이의 협력을 유인-무인 협력MUM-TManned-Unmanned Teaming이라는 고유 명사로 부르고 있다.

[그림 2] 인간은 단순한 운영자 입장인 폭발물 처리(EOD) 로봇
미 육군 항공 학교에서 2013년 발표한 MUM-T 전략 요약에 담긴 정의는 다음과 같다.
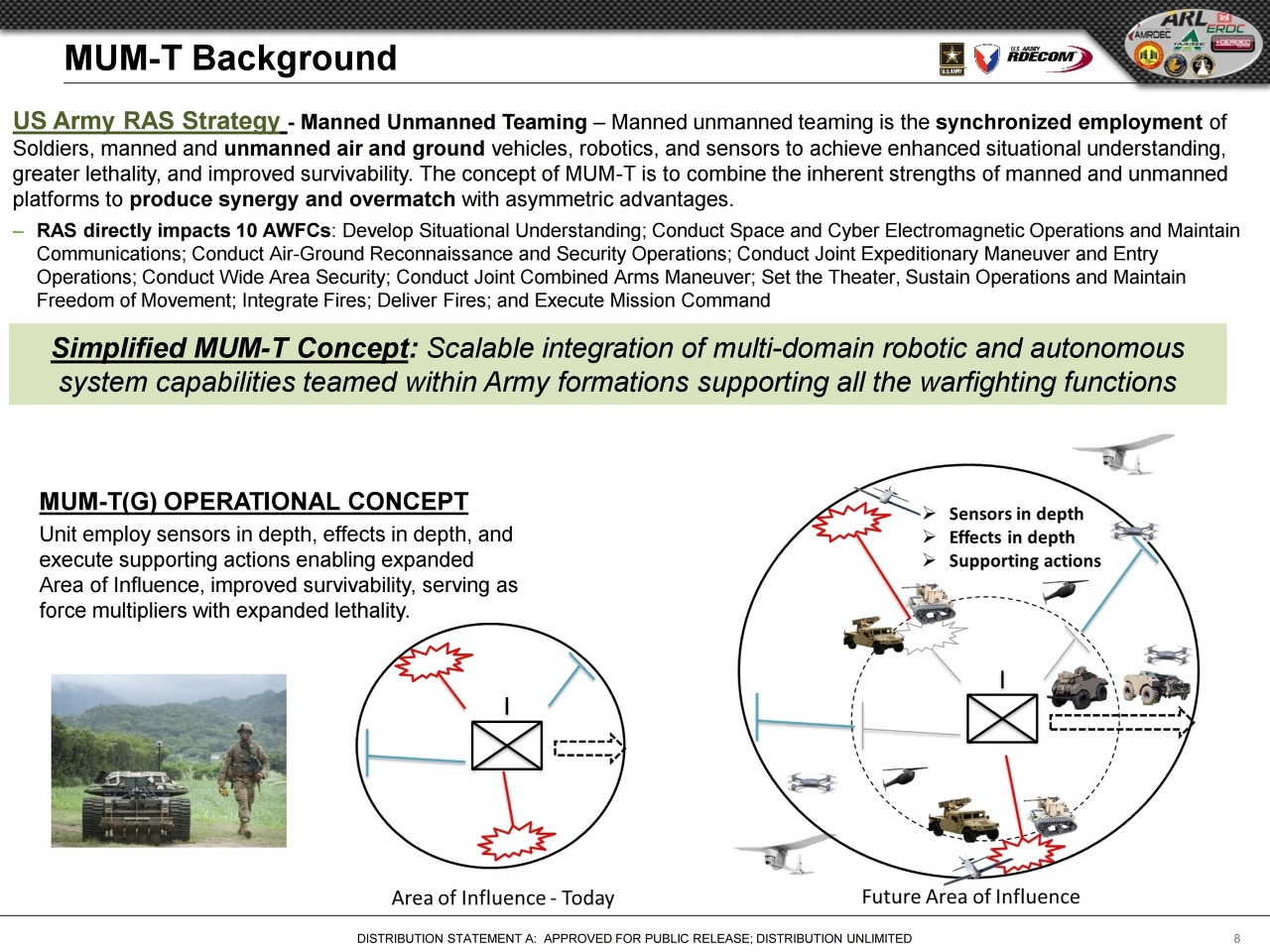
“병사, 무인 및 유인 항공기, 지상 차량, 로봇 및 센서를 동기화하여 상황 인식 향상, 살상력 증대 및 생존성을 향상시킨다. MUM-T의 개념은 유인 및 무인 플랫폼의 고유한 장점을 결합하여 비대칭 이점을 가진 시너지와 우월성을 만드는 것이다.”
The synchronized employment of Soldiers, manned and unmanned air and ground vehicles, robotics, and sensors to achieve enhanced situational understanding, greater lethality, and improved survivability. The concept of MUM-T is to combine the inherent strengths of manned and unmanned platforms to produce synergy and overmatch with asymmetric advantages.
미 국방부는 1990년대 후반부터 유인 시스템과 무인 시스템을 협력시킬 방법을 모색하기 시작했지만, 구체적 성과는 없었다.
그러나 무인 시스템의 사용이 많이 늘어난 2000년대 이후 본격적으로 추진되었다. 테러와의 전쟁이 시작된 직후인 2002년에 미 육군, 해군, 공군 그리고 해병대는 총 167대의 무인기를 운용했다.
2010년에는 4,000대가 넘는 무인기를 운용했고, 비행시간도 1백만 시간을 넘겼다.

[그림 3] 유인-무인 협력의 중심에 있는 미 육군 회전익기와 무인기들
무인기의 양적 성장이 시작되던 2003년 군대 내 무인 항공기 개발과 배치가 군 정보부서에서 항공부서로 이관되었다.
이 과정에서, 무인기의 임무가 전략적 정보, 감시, 정찰(ISR)에서 전술적 스카웃-정찰SRScout-Reconnaissance로 변화했다.
이런 임무 변동으로 항공작전에 무인기를 더욱 중앙 집중적으로 통합할 필요성이 생겼다. 그때부터 항공 SR 임무를 위한 MUM-T의 필요성이 부각되기 시작했다. 미 육군에서 2010년 이후 MUM-T에 대한 연구가 활발하게 진행되었다.
[그림 4] 미 고등방위연구국의 미 육군 MUM-T 전략 설명도
MUM-T는 무인 시스템의 혁신적인 잠재력을 활용하여 기술 우위를 확보하기 때문에 최첨단 군사 기술과 무기를 통해 우위를 점한다는 미국의 제3차 상쇄전략Third Offset Strategy에 필수 요소로 인식되고 있다. 또한 미 국방부가 추구하는 교차 영역Multi-Domain 전투를 위한 수단이 되고 있다.
MUM-T에 사용되는 무인 시스템은 ➊ 플랫폼에서 사람을 제거한 무인 시스템의 이점을 살려 속도, 기동성, 체공시간의 제한이 줄어들며, ➋ 첨단 컴퓨터와 빅데이터, 인공지능, 사이버 등 다양한 관련 시스템에서 파생된 이점을 활용할 수 있다.
MUM-T를 위해서는 기술적으로 안정된 무인 시스템과 탑재물Payload, 유인과 무인 시스템을 네트워크로 연결할 시스템, 단절 없는 데이터링크가 필수적이다. 또한 새로운 전략과 전술을 위한 교육도 필수적이다.
미 육군은 MUM-T가 중요해지면서 무인기 운용 훈련에 관련 교육을 강화하고 있다. 하지만 이에 앞서 통합 작전을 위한 교전 규칙 정립 등 정책적 과제를 먼저 해결해야 한다.
북대서양 조약기구(NATO)는 1998년 UAV 시스템 상호 운용성을 위한 표준인 STANAGStandardization Agreement 4586을 규정했다.
이 규정은 아키텍쳐, 인터페이스, 통신 프로토콜, 데이터 요소, 그리고 메시지 형식 등을 정의했다. STANAG 4586은 상호운용성 수준LOILevels of Interoperability을 다섯 가지 레벨로 정리했다.
■ 레벨 1 : UAV 관련 데이터 및 메타데이터의 간접적인 수신/송신
■ 레벨 2 : UAV 관련 데이터 및 메타데이터의 직접적인 수신/송신
■ 수준 3 : 비행체가 아닌 UAV 탑재물의 제어와 모니터링
■ 레벨 4 : 이륙 및 착륙을 제외한 UAV 제어와 모니터링
■ 레벨 5 : 이륙 및 착륙을 포함한 UAV 제어와 모니터링
■ 레벨 2 : UAV 관련 데이터 및 메타데이터의 직접적인 수신/송신
■ 수준 3 : 비행체가 아닌 UAV 탑재물의 제어와 모니터링
■ 레벨 4 : 이륙 및 착륙을 제외한 UAV 제어와 모니터링
■ 레벨 5 : 이륙 및 착륙을 포함한 UAV 제어와 모니터링
현재 MUM-T 관련 시스템을 개발하거나 도입하려는 군대들은 LOI 레벨 2~5를 목표로 하고 있다.
• MUM-T 현황
MUM-T는 개념의 정립과 연구가 시작된 지 오래되지 않았다. 미 육군은 2010년 이후 지속적으로 연구와 시험을 계속하고 있다.
◆ 항공분야
미 육군은 MUM-T를 중요한 능력으로 간주하고 있으며, 개발과 도입에 앞장서고 있다. 미 육군은 무인기를 중심으로 한 MUM-T를 먼저 추진했다.
미 육군은 2011년 9월 유타주 더그웨이 시험장에서 OH-58D 카이오와 워리어 무장정찰 헬기와 RQ-7 쉐도우 무인기를 사용한 유인-무인 시스템 통합 능력Manned Unmanned System Integration Capability 훈련을 진행했다. 하지만, 개념 정립 단계에 그쳤다.

[그림 5] 2011년 시험된 OH-58D와 RQ-7 쉐도우 무인기 팀 구성
미 육군이 우선적으로 추진하고 있는 MUM-T의 유인 시스템은 AH-64 아파치 공격헬기다.
미 육군은 AH-64D와 AH-64E 공격헬기에 적용될 MUM-T 개발을 위해 미 육군 아파치 프로젝트 사무국Apache Project Office, 항공 프로그램 실행 사무국Program Executive Office Aviation, 록히드 마틴과 노드롭 그루만의 조인트 벤처인 롱보우 주식회사Longbow Limited. 그리고 L3 커뮤니케이션과 보잉이 함께 만든 SES와 협력하고 있다.
AH-64D 공격헬기는 통합된 LOI 2 기능을 가진 다중대역의 상호운영이 가능한 데이터 링크를 통해 비 전술 공통 데이터링크TCDLTactical Common Data Link 밴드 대역으로 외부의 다양한 플랫폼들에서 영상을 수신할 수 있다. 미 육군은 AH-64D에 통합된 LOI 레벨 2 MUM-T를 MUMT-2로 부르고 있다.
MUMT-2의 데이터 링크는 무인기 시스템(UAS) 또는 아파치의 M-TADS 표적 획득 시스템의 비디오 영상 또는 메타데이터를 다른 아파치 공격헬기에 재전송할 수 있다.
또한 원격 영상 터미널을 갖춘 지상군에게도 전송할 수 있다. 현재 미 육군 항공대의 주력 공격헬기인 AH-64E 아파치 가디언 공격헬기에 통합된 UAS 전술 공통 데이터링크 어셈블리UTAUAS Tactical Common Data Link Assembly는 도달거리 50km가 넘으며, LOI 레벨이 3과 4 수준에 이른다.
AH-64E 공격헬기에 장착된 UTA는 TCDL를 장착한 UAS와 호환된다.
이 두 가지 MUMT는 AH-64 공격헬기 조종사에게 상황 인식 향상과 네트워크 중심 상호 운용성을 제공하면서, 탐지에서 발사까지 이르는 센서 투 슈터Sensor-To-Shooter 시간을 크게 단축하고 있다.
이를 통해 적 화력에 대한 노출을 줄임으로써 아파치 공격헬기와 지상군의 생존성을 향상시킨다.
또한 주요 결정 포인트를 빨리 식별할 수 있다. 아파치 공격헬기에 MUM-T 기능을 추가하면서 원래 임무인 공격에 정찰이 추가되었다.
장거리 데이터링크를 통해 전술, 작전, 그리고 전략 사령부에 적시적으로 임무 명령과 정보를 전달하는 능력을 키울 것이다.
2013년 캘리포니아주 포트 어윈Fort Irwin의 국가 시험센터에서 실시된 AH-64E 공격헬기의 MUM-T 운용 시험에서 MQ-1C 그레이 이글Gray Eagle 무인기는 100km 넘게 떨어진 공격헬기에 영상을 전송했다.
그 결과, 아파치 조종사는 그레이 이글이 보내온 스트리밍 영상을 사용하여 자신의 자리를 떠나지 않고도 포병의 협조를 받아 식별된 표적을 파괴할 수 있었다.

[그림 6] AH-64E와 MQ-1C의 협력을 묘사한 그림
미 육군 항공대는 새로운 기능을 도입하면서 새로운 기술도 배우고 있다. 아파치 공격헬기 승무원들은 무인기의 센서를 아파치 공격헬기의 무기 조준경처럼 사용하여 표적용 솔루션을 만들어 내고 있다.

[그림 7] 미 육군 항공대의 MUM-T 시스템 구성도
미 육군이나 해병대가 준비하고 있는 유틸리티 헬리콥터 기반 유인-무인 복합기OPVOptionally Piloted Vehicle는 MUM-T의 무인 시스템으로 사용할 수 있다. 미 육군이 시콜스키와 협력하고 있는 OPBHOptionally Piloted BLACK HAWK 프로젝트, 미 해군의 자율 항공 화물 운송/유틸리티 시스템AACUSAutonomous Aerial Cargo/Utility System 프로젝트 등을 꼽을 수 있다.

[그림 8] 무인 보급 헬기 개발을 위한 시코르스키의 OPBH 프로젝트
미 육군의 OPBHOptionally Piloted BLACK HAWK는 우선 UH-60A 블랙호크 헬리콥터의 무인 버전을 개발하여 중요한 보급 임무를 수행할 수 있도록 만드는 MURALManned/Unmanned Resupply Aerial Lifter 프로젝트로 진행되고 있다. MURAL 프로젝트와 OPBH 프로젝트 모두 시콜스키가 OPV 개발을 위해 제작한 자율 기능 탑재 소프트웨어와 하드웨어 플랫폼인 매트릭스Matrix를 사용한다.
AH-64 공격헬기와 함께하는 MUM-T는 살상력 증대에 초점을 맞추고 있지만, MURAL/OPBH 프로젝트는 병사의 위험 부담 및 인지 부하를 줄이는 데 초점을 맞추고 있다. 미 육군은 2030년대 중반부터 도입될 미래 회전익기 사업인 FVLFuture Vertical Lift 사업도 MUM-T를 적용시킬 예정이다.
유럽에서도 항공분야 MUM-T 개발 움직임이 있다. 에어버스 헬리콥터와 쉬벨Schiebel은 H145 헬기와 캠콥터Camcopter S-100 무인 헬기를 사용하여 유럽 업체로는 처음으로 유인 헬기에서 무인 헬기의 이착륙을 포함한 모든 제어를 수행하는 LOI 레벨 5를 시연했다.
AH-64 공격헬기와 함께하는 MUM-T는 살상력 증대에 초점을 맞추고 있지만, MURAL/OPBH 프로젝트는 병사의 위험 부담 및 인지 부하를 줄이는 데 초점을 맞추고 있다. 미 육군은 2030년대 중반부터 도입될 미래 회전익기 사업인 FVLFuture Vertical Lift 사업도 MUM-T를 적용시킬 예정이다.
유럽에서도 항공분야 MUM-T 개발 움직임이 있다. 에어버스 헬리콥터와 쉬벨Schiebel은 H145 헬기와 캠콥터Camcopter S-100 무인 헬기를 사용하여 유럽 업체로는 처음으로 유인 헬기에서 무인 헬기의 이착륙을 포함한 모든 제어를 수행하는 LOI 레벨 5를 시연했다.

[그림 9] 에어버스 헬리콥터의 H145 헬기와 S-100 무인헬기의 MUM-T 시험 장면
호주 해군은 2017년 9월에 해군의 아들레이드Adelaide급 호위함에서 MH-60R 해상작전헬기와 보잉-인시투Boeing-Insitu 스캔이글ScanEagle 무인기를 이용한 MUM-T 작전을 시연했다고 발표했다.
이 외에 현재 여러 국가가 개발하고 있는 군집 무인기Swarm UAV도 MUM-T의 한 형태로 볼 수 있다.
이 외에 현재 여러 국가가 개발하고 있는 군집 무인기Swarm UAV도 MUM-T의 한 형태로 볼 수 있다.
◆ 지상 분야
미 육군은 지상에서도 MUM-T를 추진하고 있다. 지상에서의 MUM-T를 MUM-T(Ground)로 부르고 있다.
미 육군은 2016년 7월 하와이에서 태평양 유인-무인 구상PACMAN-IPacific Manned Unmanned-Initiative라는 지상형 MUM-T를 시험했다.
미 육군은 2016년 7월 하와이에서 태평양 유인-무인 구상PACMAN-IPacific Manned Unmanned-Initiative라는 지상형 MUM-T를 시험했다.

[그림 10] 2016년까지 진행된 미 육군 MUM-T 관련 시험들
PACMAN-I에서는 정글 환경에서 작전하는 중대급 부대를 위한 요소를 평가했다. 이 시험은 미 육군 전차, 자동차 연구, 개발 및 엔지니어링 센터TARDECTank Automotive Research, Development and Engineering Center가 주도했다. PACMAN-I에는 제25 보병사단 병사들이 코브라Kobra 710 지상로봇(UGV)을 운용했다.

[그림 11] PACMAN-I에서 코브라 710 무인 지상 로봇을 조작하고 있는 미 육군
PACMAN-I 당시 험한 정글 때문에 MUM-T(Ground)의 활용도는 낮았지만, 병사들은 무인항공기를 사용하여 적에 대한 정보를 획득했다. 이를 이용하여 공병 소대가 경로 정찰, 소형 장애물 돌파, NBCNuclear, Biological, Chemical 무기 탐지 등을 수행했다.
보병과 달리 기계화 보병에게는 MUM-T(Ground)가 유용했다. 기계화 보병용 MUM-T는 로보틱스 역량 돌파 개념Robotic Capability Breach Concept으로 불리는데, 지뢰지대 탐지, 사격 및 ISR 지원, 전차, 차량 및 인원의 경로 확보를 위한 선형 작약을 이용한 지뢰지대 돌파용 배치 등에 사용되었다.
카메라를 갖춘 휴대가 가능한 UGV가 확보한 정보와 영상은 넷 워리어Net Warrior 시스템을 통해 병사들에게 전달되었다.
병사들은 동료 병사들의 위치를 나타내고, 영상과 문자 메시지를 보낼 스마트폰과 함께 가슴에 장착된 스크린을 통해 수신된 정보를 확인했다.
휴대가 가능한 소형 UGV와 함께 분대급 장비를 운반할 분대급 다목적 장비 수송 로봇SMETSquad Multipurpose Equipment Transport, 150kg(3,300파운드) 이상 나가는 무거운 장비, 물자, 무기 그리고 탄약을 운반할 무인 지상 로봇도 시험 되었다.
미 육군 교육사령부TARDOCTraining and Doctrine Command는 육군 전투원 평가AWAArmy Warfighter Assessment 2017을 통해서 MUM-T 개념을 확인했다.
AWA는 육군의 전투 문제를 해결하고 미래의 군을 다듬는데 활용하는 TARDOC의 중요한 행사다. TARDOC는 AWA 2018과 합동 전투원 평가JWAJoint Warfighter Assessments 2019와 2020을 통해서 MUM-T를 계속 발전시켜 나갈 예정이다.
2017년 8월, 포트 베닝의 기동훈련센터에서 미 육군의 TARDEC와 무기연구·개발·엔지니어링센터(ARDEC), 해군연구처(ONR)가 3년간 노력한 성과를 보여줬다.
시연에서 유인 차량과 무인 차량이 협력하여 임무를 수행했으며, M1A2 전차와 M577 지휘 장갑차가 무인 체계를 통제하는 지휘소 역할을 했다.
시연에는 반자율 MRZR 전지형 차량과 전선으로 연결된 호버플라이Hoverfly 쿼드콥터가 정찰을 수행했고, 무인 험비가 유인 험비에 앞서 이동하여 적 위치를 탐지했다.
적의 위치가 탐지되면 윙맨Wingman 역할을 하는 다른 무인 험비 전술차량에 탑재된 ADIM Automated Direct Indirect-fire Mortar이 공격을 수행했다. ADIM은 직사와 곡사 모두 가능한 81mm 박격포로 다양한 표적에 대응이 가능하다.

[그림 12] 미 육군의 MUM-T 시험에 참가한 50구경 기관총을 장착한 무인 지상 로봇
자율 주행이 가능한 M113 병력수송장갑차(APC)는 전방 척후 임무를 수행하면서, 연막 차폐로 M1A2 전차의 이동을 은폐했다.
미 육군은 M1A2 전차에 자동장전장치를 장착하고, 임무가 해제된 장전수가 무인항공기와 무인 지상차량을 제어하는 책임을 부여할 수 있는지를 평가할 계획이다. 시연에 동원된 모든 차량에는 만약을 대비하여 병력이 탑승했다.
미 육군의 MUM-T에서 중요한 요소는 로봇 윙맨이다. TARDEC는 2017년부터 험비 전술차량을 자율적으로 조종하고, 장착된 7.62mm 무기 시스템으로 타격할 수 있게 만드는 윙맨 합동 능력 기술 시연JCTDJoint Capability Technology Demonstration 프로그램을 진행하고 있다. 윙맨 JCTD의 목표는 전선에서 병사들에 앞서 무인 전투차량을 보낼 수 있도록 하는 것이다.
이 프로그램은 무인 전투차량의 시험 외에도 탑재될 무장의 신뢰성을 높이기 위한 새로운 시스템도 평가하고 있다. 미 육군의 무장 연구 개발을 담당하는 ARDECArmaments Research, Development and Engineering Center는 무장 시스템의 신뢰성을 높이기 위해 ARASAdvanced Remote Armament System을 개발했다. 가스 작동식 M240B 기관총은 ARAS가 적용되어 전기 작동식으로 개조되었다.
효율적인 전투를 위해서 시각을 기반으로 하여 자율적으로 표적을 탐지하고, 사용자가 사전에 지정한 표적을 사용해 식별 시간을 단축하는 자율 원격 교전 시스템Autonomous Remote Engagement System을 채택했다. 그러나 미 육군의 목표는 자동으로 지정되지만, 컴퓨터가 아닌 병사들이 방아쇠를 당길 시점을 결정할 것이라고 밝혔다.

[그림 13] 2017년 8월 포트 베닝에서 열린 MUM-T 시연에 참가한 기관총 장착 무인 험비
미 육군은 윙맨 JCTD를 50구경 기관총이 장착된 CROWSCommon Remotely Operated Weapon Station 원격무장대(RWS)를 장착한 M113 병력수송장갑차(APC)로 확대할 계획이다. TARDEC는 윙맨 프로그램에서 배운 내용을 COVERCombat Vehicle Robotics라는 새로운 프로그램으로 연결시킬 계획이다. TARDEC는 미 육군의 현대화 요구에 적합한 것을 찾기 위해 모든 종류의 이동 플랫폼과 살상 솔루션을 연구할 예정이다.
이런 다양한 노력을 통해 MUM-T를 시험하고 있는 미 육군은 무인 로봇 윙맨을 2023년에 공식 기록 프로그램으로 만들기 위해 노력하고 있다. 그러나 그에 앞서 미 육군의 첫 MUM-T(Ground) 도입은 분대 다목적 장비 운송SMETSquad Multipurpose Equipment Transport 시스템 도입이 될 것으로 보인다. SMET는 분대를 따라다니면서 군장과 탄약 등의 물자를 운반하게 된다.

[그림 14] 미 육군 SMET 사업에 참여한 HDT 제안 무인 지상로봇

[그림 15] SMET를 활용한 부상자 운반용 무인 지상 로봇
미 육군은 2017년부터 SMET 도입을 위해 10가지 무인 시스템을 평가했고, 12월에 제너럴 다이나믹스 랜드 시스템즈General Dynamics Land Systems, 폴라리스Polars와 ARAApplied Research Associates Inc팀, 하우 앤 하우Howe and Howe 그리고 HDT의 4개사 제안을 2차 사업자로 선정하였다.
미 육군은 2018 회계연도 2분기에 2개 보병여단전투팀(IBCT)에 4개 업체의 SMET 제안을 보내 1년간 평가할 예정이다. 최종 제품 선정은 2019 회계연도 2분기에 이루어질 것으로 보인다.
해군 분야는 주로 항공 시스템을 이용한 MUM-T에 초점이 맞추어져 있으며, 함정 부분은 아직 무인 자율 시스템에 초점이 맞춰져 있다.
이상으로 유인-무인 협력인 MUM-T에 대해서 알아보았다. MUM-T는 미래 군사 전략에서 중요한 한 요소가 될 전망이다. 다양한 무인 시스템을 도입하려는 우리 군에게도 매우 중요하다.
육군의 드론-봇 시스템은 우리 군 최초의 MUM-T가 될 것으로 전망된다. 이를 위한 시스템 개발과 함께 효과적인 운용을 위한 체계적인 훈련 체계의 마련이 시급하다.
대표 이미지






댓글 영역